Though QGD predicts the existence of structures which exerts such gravitational pull that photons cannot escape. But contrary to the classical black holes predicted by relativity, the black holes predicted by quantum-geometry dynamics are not singularities. The QGD exclusion principle which states that a preon(-) cannot be occupied by more than one preon(+) implies that quantum-geometrical space imposes a limit to the density any structure can have. The density of black holes is also limited by the fact that preons(+), being strictly kinetic, they must have enough space to keep in motion. It follows that black must have very large yet finite densities.
Angle between the Rotation Axis and the Magnetic Axis
The effect of the helical motions of the electrons in direction of the rotation of a body adds up so that, at a large scale, the body behaves as a single large electron which though helical trajectory around the body interacts with the neighbouring preonic region to generated a magnetic field.
Since the magnetic field is the result of the polarization of free }}") along the loops of the helical trajectory, and since the inclination of these loops increase with the rotation speed, so does the angle between these loops and the axis of rotation increases. It follows that the angle between the axis of rotation and the magnetic axis for bodies of given material composition is proportional to the speed of rotation about its axis and its diameter.
along the loops of the helical trajectory, and since the inclination of these loops increase with the rotation speed, so does the angle between these loops and the axis of rotation increases. It follows that the angle between the axis of rotation and the magnetic axis for bodies of given material composition is proportional to the speed of rotation about its axis and its diameter.
This angle between the axis of rotation and the magnetic axis is small for slowly rotating bodies but can never be so small that the axes coincide. From the above, it also follows that a faster rotation not only implies a larger the angle between the rotation axis and the magnetic axis is, but also a flattening of the magnetic field and an increase in its intensity.
The Inner Structure of Black Holes
To understand the structure of a black hole we will look at what happens to a photon when it is captured by it the gravitational pull.
The model for light refraction that we introduced in earlier articles can be applied directly to photon moving through a black hole. Since we assume that the black hole is extremely massive, its trajectory will bring it towards the center of the black hole.
When moving along the magnetic axis of the black hole, the component of the }}") pairs of the photon are pulled away from each other, splitting the photon into free which may or not recombine into neutrinos. This works as follow:
pairs of the photon are pulled away from each other, splitting the photon into free which may or not recombine into neutrinos. This works as follow:
As we have seen earlier in this book, the force binding the of a pairs is gravitational. The QGD gravitational interaction between particles at the fundamental scale is ={{m}_{a}}{{m}_{b}}\left( k-\frac{{{d}^{2}}+d}{2} \right)") , and since
, and since  and
and  are ,
are ,  and since
and since  , the binding force between two of a pair is equal to
, the binding force between two of a pair is equal to  .
.
For a photon moving along the magnetic axis, we have and -G\left( p_{1}^{\left\langle + \right\rangle };{{{{R}'}}_{1}} \right)>k-1") where
where  and
and  are the component of a pair of a photon.
are the component of a pair of a photon.
The regions  and
and  , on each side of the black hole axis are equally massive regions. If we call
, on each side of the black hole axis are equally massive regions. If we call  and
and  the regions each side of when the photon’s trajectory is aligned with the black hole axis then
the regions each side of when the photon’s trajectory is aligned with the black hole axis then  and . Similarly, if we call
and . Similarly, if we call  and
and  the region on the each side then
the region on the each side then  and
and -G\left( p_{2}^{\left\langle + \right\rangle };{{{{R}''}}_{2}} \right)>k-1") . So the force pulling the of pairs being greater than the force that binds them, the pairs are split into single .
. So the force pulling the of pairs being greater than the force that binds them, the pairs are split into single .
How do we that the gravitational forces within a black hole are sufficiently strong to cause the photons to be broken down into ? If the gravitational forces within the black hole were not enough to breakdown the photons, then photons moving along a black hole axis would escape into space making the black hole visible. Since black holes do not emit light, then the gravitational interactions must be strong enough to break photons down into and neutrinos.
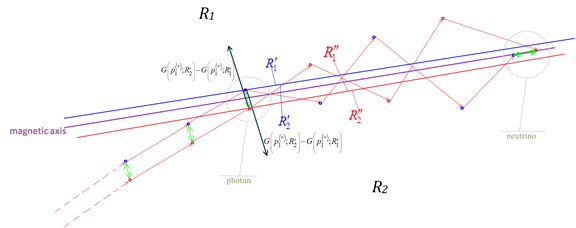
The image above shows how a simple two photon is split into two free which because of the the electro-gravitational interactions move back toward the magnetic axis. But, because the quantum-geometrical space occupied by the black holes is densely populated by particles which affect randomly the trajectories of the single , our two arrive at the magnetic axis of the black hole at different positions. And if they are in close enough proximity, the single will combine to form a neutrino which structure, not being made of pairs, remains structurally unaffected by the intense gravitational interactions within the black hole.
Once the trajectories of the or the neutrino coincides with the magnetic axis of the black hole, the or neutrinos will move through the center of the black hole and will exit it. }}") and neutrinos can escape the gravitation of the black hole because gravitational interactions, though it affects the directions of , doesn’t change their momentums which, as we have seen in earlier articles is fundamental and intrinsic (the momentum of a is
and neutrinos can escape the gravitation of the black hole because gravitational interactions, though it affects the directions of , doesn’t change their momentums which, as we have seen in earlier articles is fundamental and intrinsic (the momentum of a is  where
where  is momentum vector of a ).
is momentum vector of a ).
It follows, that all matter that falls into a black hole will be similarly disintegrated into and neutrinos, which will exit the black hole. The black hole will thus radiate and neutrinos, in jets at both poles of their magnetic axis of rotation. Since and neutrinos interact too weakly with instruments to be detected by our instruments, they are invisible to them. In order to see the -neutrinos jets from a black hole, instruments may need detectors larger than our solar system. However, the jets can be observed indirectly when they interact with large amount of matter when the polarized and neutrinos they contain impart it with their intrinsic momentum. It is worth noting that polarized preons and neutrinos jets, as described by QGD, would contribute to the observed dark energy effect.
Based on QGD’s model of the black hole, we can predict that the /neutrino jets will form an extremely intense polarized field along the magnetic axis creating the equivalent of a repulsive electromagnetic effect at both poles. The polarized preonic field would repulse all matter on their path, which may explain the shape of galaxies.
From what we have discussed in the preceding section, we can define a black hole as an object which mass is such that it can breakdown all matter, including photons, into .
The QGD model of the physics of black hole has another important implication. The and neutrinos resulting from the breakdown of a particle or structure are indistinguishable from the or neutrinos resulting from the breakdown of any other particle or structure. This means, if QGD is correct, that all information about the original particle or structure is lost forever. That said, since this consistent from QGD’s axioms set and since, unlike quantum mechanics, QGD does not require that information be preserved, the loss of information it predicts does not lead to a paradox ( see this article for an excellent introduction to subject).

Cosmological Consequences
The mechanism of emission of and neutrinos will be continue until the black hole has been completely evaporated; which it will after it has absorbed all matter in its vicinity. By this mechanism, which had formed particles and structures are disintegrated into free and neutrinos which are then returned to the universe.
In later phases, the free and neutrinos will form new particles and structures, eventually leading to the formation cosmic structures and black holes. And later, due to gravitational interactions, these cosmic structures will ultimately be absorbed by black holes, which break down matter into and neutrinos, repeating the cycle indefinitely.
For a more complete discussion on the subject, see relevant sections in Introduction to Quantum-Geometry Dynamics.
 steel balls, when lifting then dropping subset consisting of
steel balls, when lifting then dropping subset consisting of  numbers of balls, the impact with set
numbers of balls, the impact with set  number of balls will in motion. The problem will be to predict and explain which balls will be set in motion from the impact as well as determine their momentum and speed.
number of balls will in motion. The problem will be to predict and explain which balls will be set in motion from the impact as well as determine their momentum and speed. as
as  and the its speed as
and the its speed as  where
where  is its mass in preons(+). Thus momentum and speed are intrinsic properties independent of the frame of reference.
is its mass in preons(+). Thus momentum and speed are intrinsic properties independent of the frame of reference. where
where  .
. where
where  and
and  are respectively the momentum of a group of
are respectively the momentum of a group of  where
where  , we have
, we have  or
or  and since
and since  . That is, the momentum transferred must be an integer multiple of the mass of a ball. This all we need to explain and predict the behaviour of a Newton’s cradle system from initial conditions are known. Let’s examine now a few examples showing how the above applies.
. That is, the momentum transferred must be an integer multiple of the mass of a ball. This all we need to explain and predict the behaviour of a Newton’s cradle system from initial conditions are known. Let’s examine now a few examples showing how the above applies.
 which leave
which leave  balls on the right. Now, we know that the momentum can only be transferred in integer multiples of
balls on the right. Now, we know that the momentum can only be transferred in integer multiples of  ,
,  each, but since the total momentum of the blue balls is
each, but since the total momentum of the blue balls is  that leaves us with
that leaves us with  . Since the remaining momentum cannot be transferred, it will be kept by the blue balls. But here again, it cannot be divided between the three blue balls, which would imply them having momentums that are non-integer multiples of
. Since the remaining momentum cannot be transferred, it will be kept by the blue balls. But here again, it cannot be divided between the three blue balls, which would imply them having momentums that are non-integer multiples of 
 , leaving one ball. Applying what we’ve learned above, we see that four is divisible by one. Then the entire momentum of the blue balls can be transferred to the red ball. Using QGD definitions we gave at the beginning of this article, we find that the speed of red ball is four times that of the speed of the group of blue balls.
, leaving one ball. Applying what we’ve learned above, we see that four is divisible by one. Then the entire momentum of the blue balls can be transferred to the red ball. Using QGD definitions we gave at the beginning of this article, we find that the speed of red ball is four times that of the speed of the group of blue balls.


 , but the momentum cannot be transferred completely to the red balls.
, but the momentum cannot be transferred completely to the red balls.  can be transferred to the six red balls on the left, leaving us with
can be transferred to the six red balls on the left, leaving us with 
 where
where  is the magnitude of the momentum vector of a particle or a structure
is the magnitude of the momentum vector of a particle or a structure the momentum vectors of the component preons(+) of
the momentum vectors of the component preons(+) of  its mass measured in preons(+). The speed of particle is defined as
its mass measured in preons(+). The speed of particle is defined as  . We saw that when a structure
. We saw that when a structure  , then its new momentum
, then its new momentum  is given by
is given by  . We also saw that when
. We also saw that when ") , the change in momentum
, the change in momentum  is equal to
is equal to  \right\|") so that
so that \right\|") . This is explained in more details in earlier articles. Now, let us see how QGD’s equations can be applied to explain and predict reality at our scale. To illustrate this, we will apply the QGD’s equations to baseball.
. This is explained in more details in earlier articles. Now, let us see how QGD’s equations can be applied to explain and predict reality at our scale. To illustrate this, we will apply the QGD’s equations to baseball.
 is hit by a baseball ball, itself going at speed
is hit by a baseball ball, itself going at speed . Using the definitions above, we know that the momentums of
. Using the definitions above, we know that the momentums of  and their speed by
and their speed by  . We also know that saw that, if space is quantum-geometrical, any change in momentum of an object must an exact multiple of it mass. That is :
. We also know that saw that, if space is quantum-geometrical, any change in momentum of an object must an exact multiple of it mass. That is :  . As a consequence, unless the mass of the bat is an exact multiple of the mass of the ball, it cannot transfer all of its momentum to it. Then
. As a consequence, unless the mass of the bat is an exact multiple of the mass of the ball, it cannot transfer all of its momentum to it. Then  and
and  , where the brackets represent the
, where the brackets represent the  and since
and since  , the ball cannot transfer momentum to the bat. The ball retains the momentum it had before the impact (with direction reversed) so that the total momentum of the ball immediately after impact is given by
, the ball cannot transfer momentum to the bat. The ball retains the momentum it had before the impact (with direction reversed) so that the total momentum of the ball immediately after impact is given by  and its speed
and its speed  .
.
 , which relate force
, which relate force  to mass
to mass  and acceleration. Using this, how exactly does one determine the acceleration of ball after impact with a bat? To do so within the framework of classical physics, we would need to know
and acceleration. Using this, how exactly does one determine the acceleration of ball after impact with a bat? To do so within the framework of classical physics, we would need to know  , the speed of the ball after impact, and
, the speed of the ball after impact, and  the time interval over acceleration occurred. From these we can calculate given by
the time interval over acceleration occurred. From these we can calculate given by  . Measuring
. Measuring  is relatively easy. The difficulty is in measuring the time interval
is relatively easy. The difficulty is in measuring the time interval  so that
so that  . And, using Newton’s second law of motion,
. And, using Newton’s second law of motion,  . That is, if space is continuous, an infinite amount of force would be necessary to accelerate a baseball in the opposite direction from the point of impact.
. That is, if space is continuous, an infinite amount of force would be necessary to accelerate a baseball in the opposite direction from the point of impact.